The Avionics Team is responsible for all onboard electronic systems, including the flight computer(s), power management, sensor data collection and payload integration (electrical/software). For this purpose, we develop custom PCBs and the (fully oxidized) embedded software that makes it happen.
Hardware Architecture
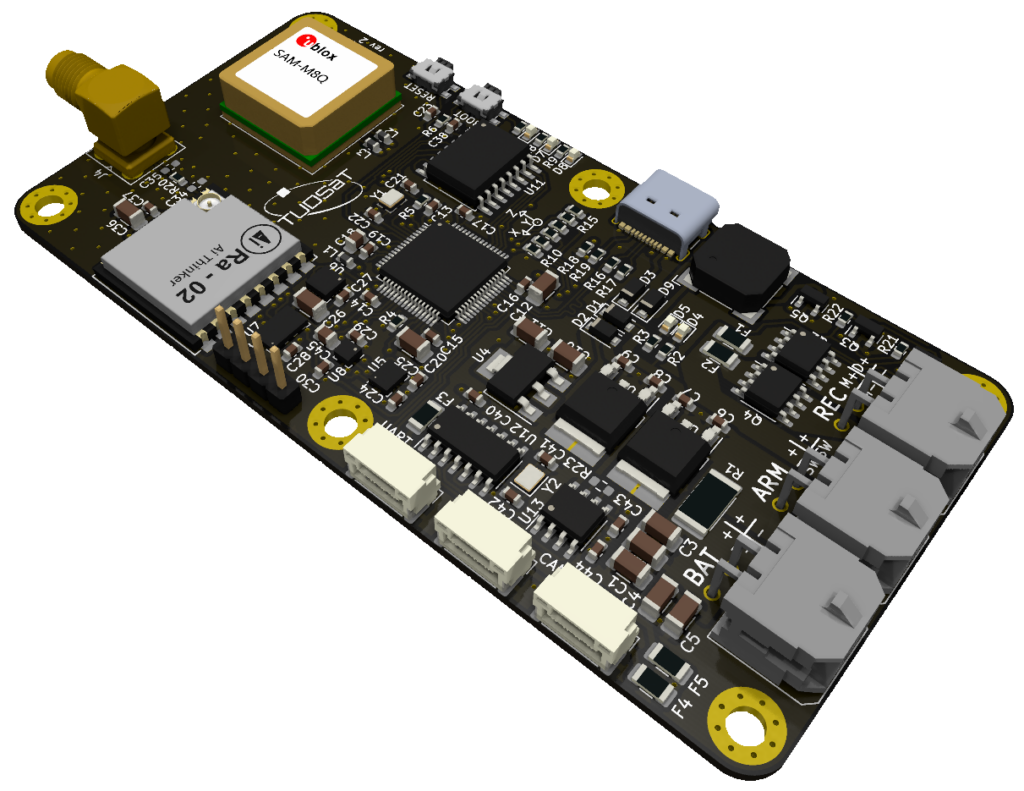
The primary mission for the avionics system is to control the deployment of recovery mechanisms such as parachutes. Thus, our custom-developed flight computer “Sting” holds all the sensors needed to track the rocket’s trajectory and wires directly to the recovery system. All the sensor data collected is stored in on-board memory and downlinked to our ground station. Each flight computer is powered by its own power management module that hosts LiIon batteries and enables on-pad charging.
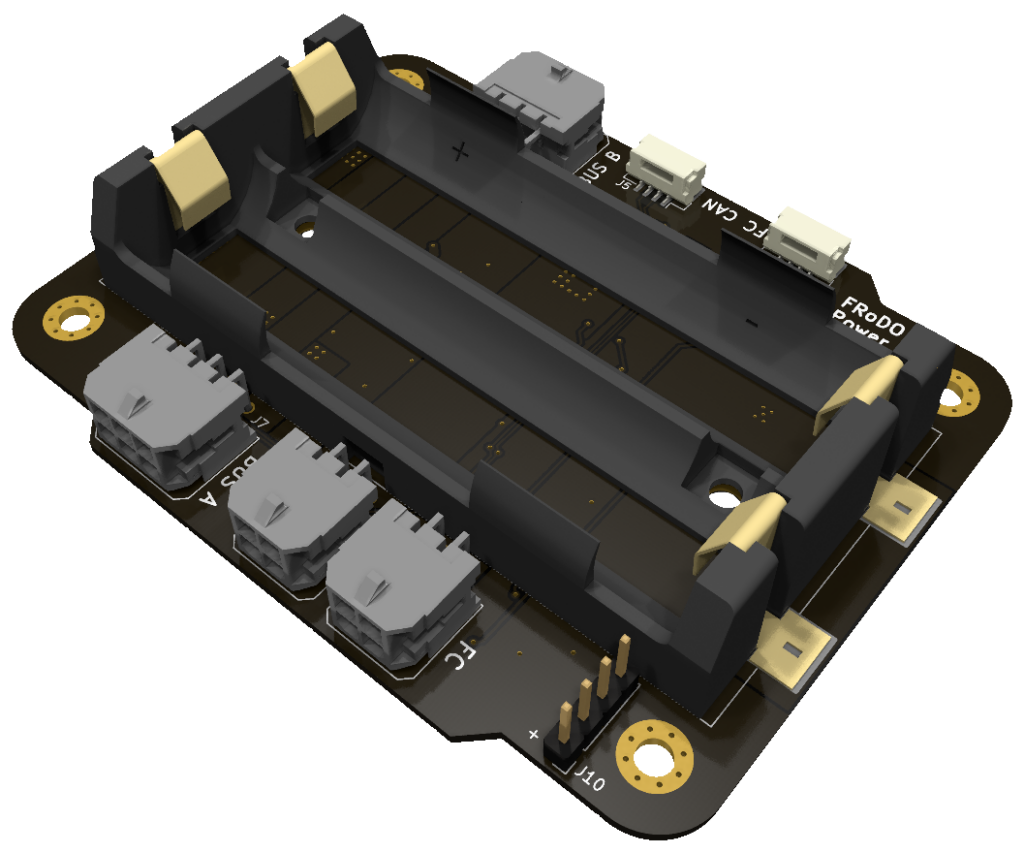
There are many secondary mission objectives such as collection of sensor data, control of onboard camera systems, actuation of non-mission-critical systems and communication with payloads, and the systems involved are located all over the rocket. The rocket therefore has a vehicle bus running along the length of the rocket that consists of a voltage supply and a CAN bus communication line. Custom-developed IO modules then provide sensor, actuator and communication ports and relay information between those endpoint devices and the flight computer via the CAN bus.
Software Development
The main software components of the system are the flight computer firmware and ground station software. The flight computer collects basic sensor data like inertial measurements and barometric pressure and uses a Kalman filter to estimate the rocket’s current state (such as altitude or velocity), which are then used to trigger recovery deployment and other events at the correct time. This data is also downlinked to our ground station via a LoRa-based half-duplex telemetry link.
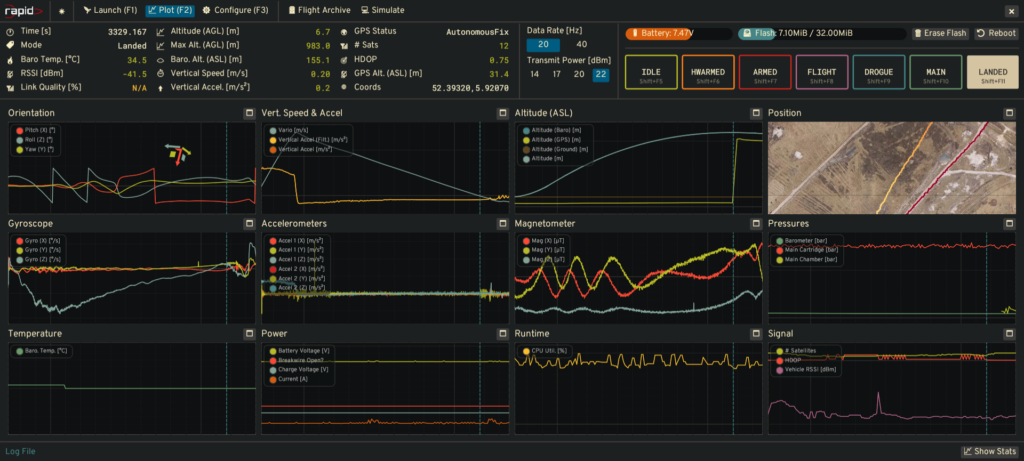
The ground station is in charge of receiving, collecting and displaying telemetry information received from the flight computers. It also allows the configuration and control of the rocket, such as manual triggering of deployment events. The ground station software also includes a simulation environment for our state estimation algorithms, allowing us to test and tune our software without leaving the ground.
Interested?
Then just join our Discord to get in touch with us, or send us an email. You can also check out our GitHub page at TUDSaT Rocket. All our projects (both hard- and software) are open-source.